Point cloud manipulation and modelling with the
Point cloud modelling
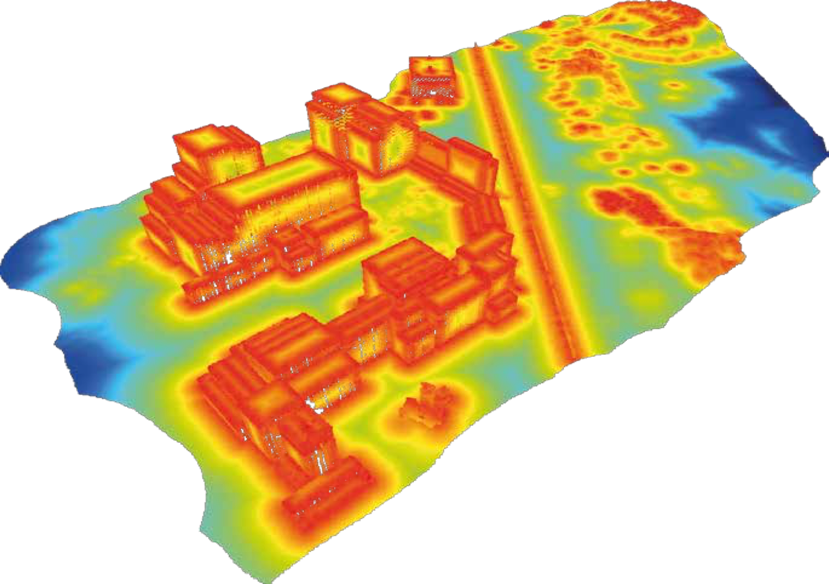
Through point clouds we can obtain dense and accurate representations of real-world objects and landscapes. If we merely look at a visualisation of this point cloud, already a great deal of information is conveyed to us. We can easily recognise different objects and measure distances, areas, and volumes.
Yet to a computer a point cloud is nothing more than a bunch of 3D coordinates, without any structure or semantics. If we want a computer do the same things, we need to first structure the point cloud in a way also a computer can efficiently make use of it.
In the 3DSM project we aim to find 3D methods and datastructes that make it easier to work with pointclouds. By achieving this we enable a number of key applications of point clouds such as point cloud visualisation, visibility analysis, automatic object detection and surface reconstruction.
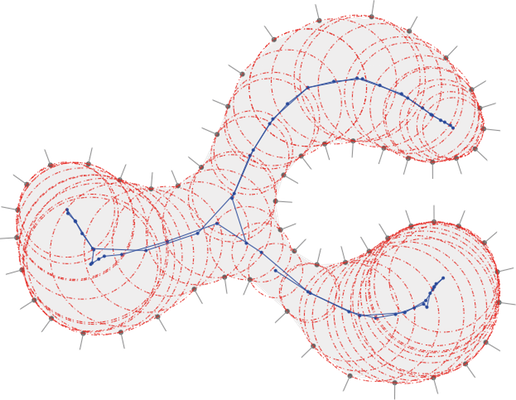
3D Medial Axis Transform (MAT)
The MAT represents the shape of an object, in 2D or 3D, with balls contained inside it, and should be seen as the skeleton of an object. Given an object, it is an alternative representation that captures both the shape of the object and its topology (how its different parts are connected), and has therefore been used in numerous shape-related problems.
MAT for point cloud modelling
The general idea of the project is to process point clouds not by manipulating the surface points, but rather by working on its MAT. While the MAT contains the same information as the conventional 'surface points' (i.e. the input point cloud), it models key properties of a shape in a much more explicit way. The key benefit of the MAT here is its skeleton-like and explicitly topological representation. Using this skeleton we can easily isolate distinct object from the point cloud and remove them for instance. This is possible because we always keep the link to the surface points while we work with the MAT.
Case studies
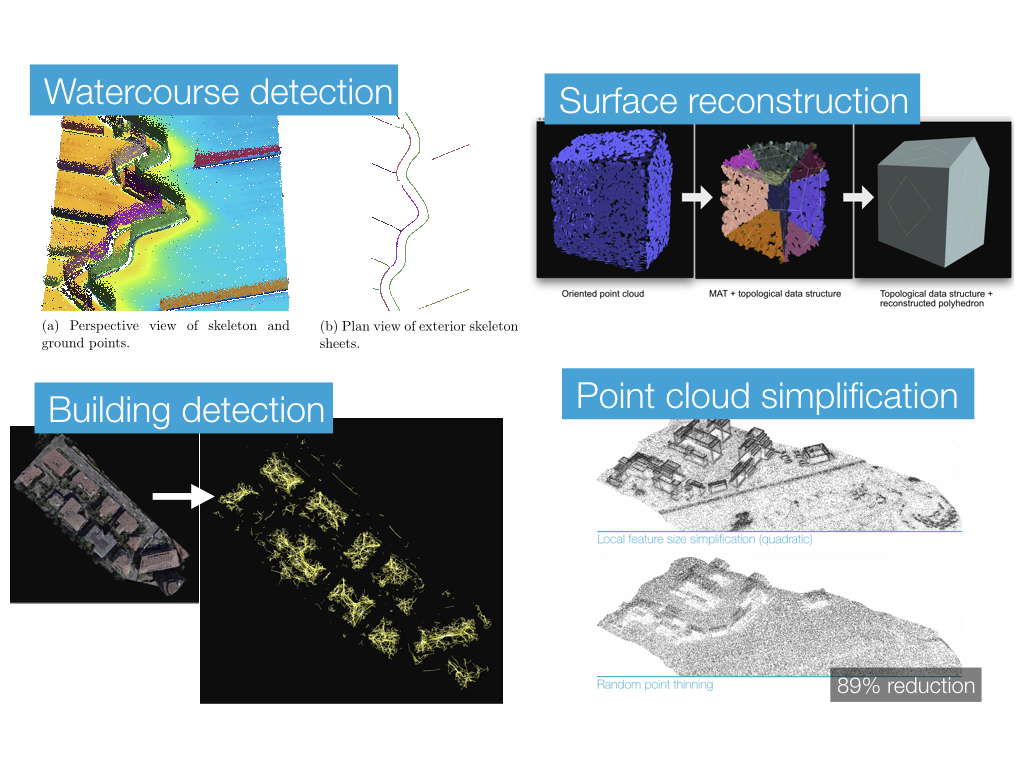
An important part of this project is to demonstrate the viablity of the MAT for a number of real-world applications and by using real-world datasets. We have identified the following case studies:
- Point cloud visualisation and simplification
- Building detection
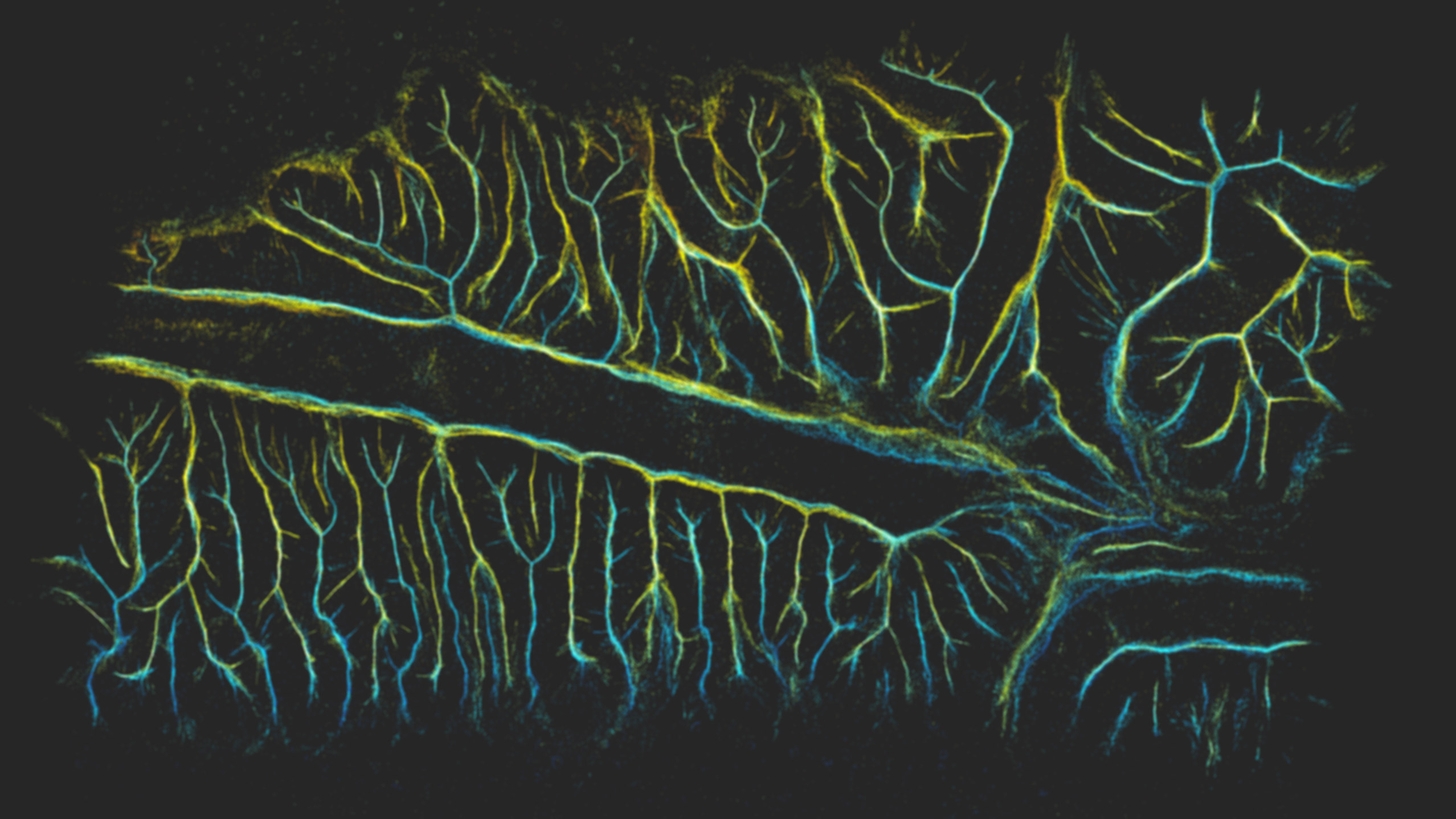
- Watercourse detection
- Visibility analysis
- Surface reconstruction
Funding
3DSM is a research project funded by the Netherlands Organisation for Scientific Research (NWO) under the Open Technology programme.
Publications
2016
PDF DOI BibTeX
@article{Peters16,
author = {Peters, Ravi and Ledoux, Hugo},
journal = {Computers \& Geosciences},
month = {mar},
number = {A},
pages = {123--133},
title = {Robust approximation of the {Medial Axis Transform} of {LiDAR} point clouds as a tool for visualisation},
volume = {90},
year = {2016}
}DOI BibTeX
@mastersthesis{Lam16,
author = {Lam, Marco},
school = {MSc thesis in Geomatics, Delft University of Technology},
title = {Creating the medial axis transform for billions of {LiDAR} points using a memory efficient method},
year = {2016}
}DOI BibTeX
@mastersthesis{Broersen16,
author = {Broersen, Tom},
school = {MSc thesis in Geomatics, Delft University of Technology},
title = {Automatic identification of water courses from {AHN3} in flat and engineered landscapes},
year = {2016}
}2015
PDF DOI BibTeX
@inproceedings{Peters15,
address = {Delft, Netherlands},
author = {Peters, Ravi and Ledoux, Hugo and Biljecki, Filip},
booktitle = {Eurographics Workshop on Urban Data Modelling and Visualisation 2015},
month = {nov},
pages = {7--12},
title = {{Visibility Analysis in a Point Cloud Based on the Medial Axis Transform}},
year = {2015}
}PDF BibTeX
@misc{15_ahn_studie_middag,
author = {Ravi Peters},
howpublished = {Presentation at the AHN/NCG studiemiddag (Amersfoort, the Netherlands)},
month = {Januari 28},
title = {Het {3D} skelet van een puntenwolk},
year = {2015}
}2014
PDF DOI BibTeX
@article{Peters14,
author = {Peters, Ravi and Ledoux, Hugo and Meijers, Martijn},
journal = {Marine Geodesy},
number = {2},
pages = {145--166},
title = {A {V}oronoi-based approach to generating depth-contours for hydrographic charts},
volume = {37},
year = {2014}
}PDF BibTeX
@techreport{14phdproposal,
address = {the Netherlands},
author = {Ravi Peters},
institution = {Delft University of Technology},
number = {GISt Report No. 65},
title = {Feature aware digital surface model analysis and generalization based on the {3D} medial axis transform},
type = {PhD research proposal},
year = {2014}
}PDF BibTeX
@misc{14_lorentz_poster,
address = {Leiden, the Netherlands},
author = {Ravi Peters},
howpublished = {Poster at the Lorentz workshop on geometric algorithms in the field},
month = {June},
title = {Approximating the Medial Axis Transform of {LiDAR} point clouds},
year = {2014}
}PDF BibTeX
@misc{14_iqmulus_workshop,
author = {Ravi Peters},
howpublished = {Presentation at the iQumulus workshop (Cardiff, United Kingdom)},
month = {July 8},
title = {Towards {M}edial {A}xis-based simplification of {LiDAR} point clouds},
year = {2014}
}PDF BibTeX
@misc{14_geobuzz_poster,
address = {s'Hertogenbosch, the Netherlands},
author = {Ravi Peters},
howpublished = {Poster at the GeoBuzz conference},
month = {November},
title = {Feature-aware {LiDAR} point cloud simplification},
year = {2014}
}PDF BibTeX
@misc{14_3dbgtdag_matahn,
author = {Ravi Peters and Hugo Ledoux},
howpublished = {Presentation at the 3D BGT dag (Amersfoort, the Netherlands)},
month = {June 19},
title = {{MATAHN:} A seamless {AHN2} download service},
year = {2014}
}2013
PDF BibTeX
@inproceedings{Peters13,
address = {Dresden, Germany},
author = {Peters, Ravi and Ledoux, Hugo and Meijers, Martijn},
booktitle = {Proceedings 16th ICA Generalisation Workshop},
editor = {D. Burghardt},
title = {Generation and generalization of safe depth-contours for hydrographic charts using a surface-based approach},
year = {2013}
}Members
| Company | Name | |
|---|---|---|
| Bentley | Benoit | Frédéricque |
| Gemeente Rotterdam | Joris | Goos |
| Sweco | Marco | Grimaudo |
| Kadaster | Marc | Post |
| Het Waterschaphuis | Niels | van der Zon |
| Rijkswaterstaat DVS | René | Visser |
| Safe Sotware | Kevin | Wiebe |
| Waterschap Scheldestromen | Sicco | van Mullem |
Team



Jantien Stoter Graduation Professor
3dgeoinfo.bk.tudelft.nl/jstoter
j.e.stoter@tudelft.nl
+31 15 27 81664
@jantienstoter